Antares mit 20"-Klapptriebwerk
Stand 19.3.2013 Erstflug war am 16.7.2011

zurück
zur wshp Startseite
Einige Daten
Hersteller
:
Jiri Baudis CZ
Maßstab: 1:3
Flügelspannweite:
6,66m
Länge: 2,47m
Flügelprofil lt. Angaben: 9 auf 8%
gemessen:
ca. 100mm von der Wurzel: 27,6mm / 266mm = 10,3%
Steckung Außenflügel: 16,6mm / 197mm = 8,4%
Ohr-Steckung: 8mm / 92mm = 8,7%
Höhenleitwerksprofil:
Flügelfläche:
Flächenbelastung:
Höhenleitwerksfläche:
Fluggewicht:
14100g mit Klapptiebwerk, ohne Pilot
Schwerpunkt: 117mm von der Nasenleiste
weitere Bilder vom 3.9.2011
Vertrieb in Deutschland:
Vertrieb in der
Schweiz:


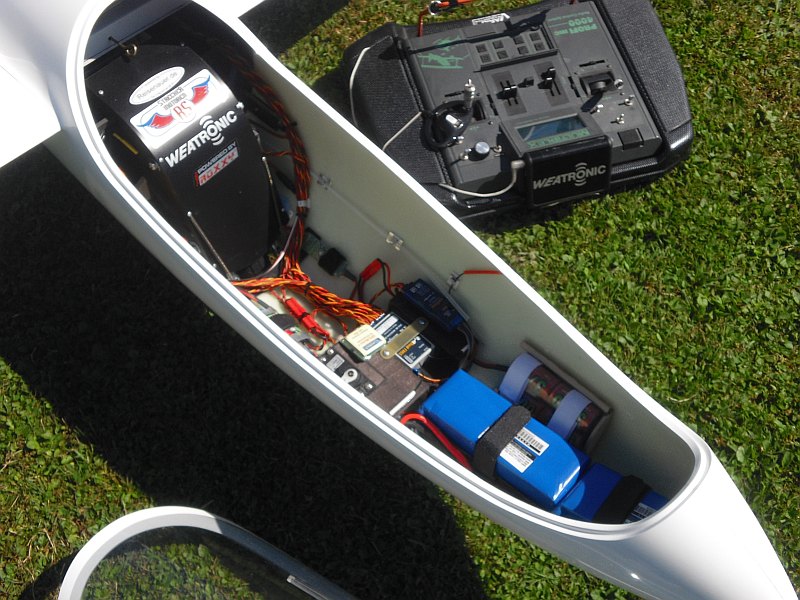
Technik
Technik nach
konservativem aber altbewährtem Muster mit einem Minimum an komplexer
Weichen-Elektronik. Soweit man das hier so sagen kann.
Je eine Stromüberwachung DPSI-OCP für Arm- und Fahrwerksservo von Emcotec.
Empfänger-Versorgung
mit Jeti S-BEC (bei 10S: 3,5A Dauer- 15A Spitzenstrom) 5.5V parallel mit
gepuffertem hochstromfesten Akku aus 4 Zellen NiMh GP3700.
Empfänger-Akku ist somit fast wartungsfrei und wird aus dem Motorakku
auf 5,5V gehalten. Dies entspricht ca. 70% Nennkapazität. Hat sich in
meinem Thermik XXL über Jahren bewährt.
Eigentlich
sollte ein 8S Antrieb verbaut werden um ein möglichst geringes
Gesamtgewicht zu erhalten. Hier hat eben jeder so seine eigenen
Vorstellung, bzw. Vorgaben. Aber mein wohl im Heck etwas
schwerere Rumpf erfordert die 10S Auslegung. Auch die Schleppkupplung
wurde entfernt um den Antriebsakku möglichst weit vorne zu platzieren.
Ergebnis ist, - es ist kein Trimmblei in der Nase. Die Sitzwanne
musste im vorderen Bereich geringfügig modifiziert werden um dem 2x5S
Antriebsakku den nötigen Platz zu verschaffen.
Empfänger: Weatronic Micro 12 Gyro III
Variometer: Weatronic LinkVario
mit GPS, Stromsensor für Strom, Spannung u. verbr. Kapazität des
Antriebs, Temperaturfühler zur Überwachung der SBEC-Temperatur,
Pitot-Speed-Sensor.
Wahlweise DataVario (433MHz) von wstech
Versorgung: Jeti SBEC (5,5V) mit Stützakku 4
Zellen NiMh GP3700, Versorgung geht direkt zu den 4
Flächensteckverbindungen für die 8
Flächenservos. Hier sind alle Plus- und Minusleitungen miteinander
verbunden. Von hier wird dann der Empfänger über die 7 Servoleitungen
(Störklappen-Servos sind parallel geschaltet) versorgt. Das genügt um
problemlos die restlichen Servos am Empfänger zu versorgen.
Die Jeti S-BEC ist so gebaut, dass man einen Stützakku [B]ohne[/B] Entkopplungsdiode parallel schalten kann.
Schalter an S-BEC hab ich entfernt, wird nicht benötigt.
Der Stützakku muss aber über einen Schalter geschaltet werden! Und man
sollte ihn nie vergessen! In meinem Fall nur eine 2mm-Steckkontakt
Verbindung.
Handling:
Man schaltet immer erst den Stützakku an und kurz vor dem Start wird dann erst der Motorakku angesteckt.
S-BEC wird nun aktiv und versorgt nun parallel zum Stützakku.
Nach der Landung erst Motorakku abstecken, dann Stützakku abschalten.
Noch ein Vorteil: Man kann gefahrlos testen ohne den Motorakku anzustecken!
Wichtig: Nur geladenen Stützakku verwenden. Nach mehr als vier Wochen Pause
den Stützakku vorsichtshalber laden. Immer wieder mit einer
Entladung den Stützakku kontrollieren.
Servos: Im Modell sind 15 Servos verbaut.
Die 2 Störklappenservos sind programmierbare Hitec HS-5085 und können somit parallel geschaltet werden.
Die 4 Querruder sind mit S3150 und RDS-Anlenkung bestückt.
Fahrwerksservo ist ein HS-5645 MG Digital, welches auf 180Grad umprogrammiert wurde.
Als Bremsservo dient ein etwas älteres HS-615.
Die beiden Wölbklappen
sind mit DES 678 BB (DS3288 war nicht lieferbar) und Servorahnmen für
HS-225 (passen exakt) versehen. Wird noch durch Gegenlager erweitert,
da diese Servos leider einen recht weichen Kunststoff haben und daher
der obere Kugellagersitz gerne ausschlägt.
Das Höhenruder wird von einem Futaba BLS 153 MG Digital gesteuert.
Seitenruderservo Graupner 4421
sitzt ganz vorne beim Empfänger. Anlenkung über CFK-Bowdenzug. Wollte
jegliches Trimmblei vermeiden. Daher wurde möglichst alles ganz vorne
verbaut.
20"-Klapptriebwerk
Eigenbau mit Prinzip nach Rolf Schuler
Gewicht mit Motor, Luftschraube und Armservo rund 800g.
Das Fahrwerk mit zwei Servos hat ein höheres Gewicht. Gut, landen muss man auch.
Beim Steller ist dieses mal der sonst bei mir bewährte YGE-Steller einem
Robbe Roxxy 975-12 gewichen, der sich zumindest bei mir mit dem 8poligen-Strecker
besser verträgt.
Das Anlaufverhalten ist damit identsich weich und kontrolliert, was man von diversen anderen Stellern nicht behaupten kann.
Motor: RS330-20-16 8P von Strecker
Getriebe: Super Chief 6:1 von Reisenauer
Steller: Robbe Roxxy 975-12
LS: RF20x13 von Freudenthaler
Akku: LiPo 2x 5s 5000mAh 1390g
Armservo: Hitec HS-7955 TG auf gut 180Grad programmiert.
Klappenservos: GWS IQ-220 BB, besser eines mit MG verwenden
Leistung:
am Boden ca.1700W input, max.1950W bei
vollen Akkus, im Steigflug im Mittel ca. 1550W
Steigleistung: typ. 5m/s
Verbrauch: ca. 800mAh für
Start und 300m Höhe, somit sind 1500m Steighöhe mit einer Ladung (80%) möglich
KTW-Steuerung: UniSteuerung Version JK von SM-Modellbau
Die neue SM-Steuerung (Firmware) mit steuerbarem Gas gibt es so etwa seit Anfang 2011 von SM-Modellbau auf Sonderwunsch.
Die zweite Hälfte des Steuerweges lässt das steuen des Steller zu. Der
Rest muss mit Mischer, Festwerten usw. im Sender erledigt werden. Habe eine MC4000 und damit geht das eigentlich mit vertretbarem Einstellaufwand.
Das alles geht natürlich wie
bisher auch mit nur einem Schalter, nur gibt es eben zusätzlich die
Möglichkeit das Gas am Störklappenhebel zu steuern. Im Flug lege ich
dann auch nur den KTW-Schalter um, -fertig.
Ich komme aus der Motorfliegerei und
neige beim Startabbruch gerne dazu den Störklappen/Gas-Hebel nach
hinten zu ziehen, statt den Schalter für das KTW zu betätigen.
Ferner kann mit dem mauellen Gas eben
das "auf die Nase gehen" beim Anrollen besser vermeiden werden. Hängt
ja sehr von der Bodenbeschaffenheit ab. Auf der Hartpiste ist das ja
alles einfacher, habe ich aber leider nicht.
Steller-Einstellungen: Robbe Roxxy 975-12
LiPo Air
Cut Off Valtage 31,5V
Cut Off Type Hard off
Advance Timing 24°
Acceleration Low
Start Power Lowest
Airbreake Type Slow
Airbreake On
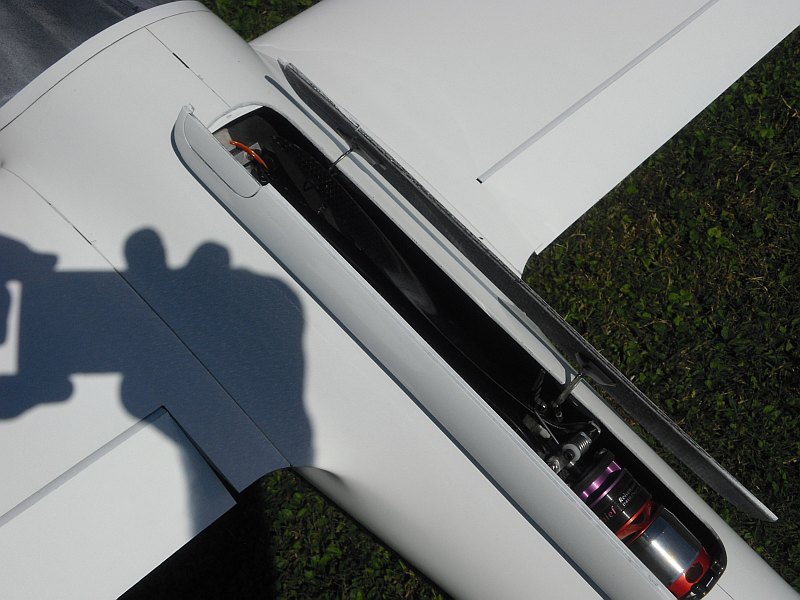
Details zum Klapptriebwerkseinbau
Der
Klappenausschnitt ist nur 58mm breit, das Luftschrauben-Mittelteil hat
maximal 57mm. Es wurde auf minimalen Durchmesser optimiert um die Höhe
des eingefahrenen Triebwerks auf knapp 100mm zu bringen. In der Antares
ist dann etwa noch 8mm Luft nach unten.
Das Klappenende ist bei 435mm hinter
der Kabine. Die Klappe selbst ist auch nur 355mm lang. Hier liegen die
wesentlichen Vorteil der Konstruktion die ursprünglich von Rolf Schuler stammt und in seinem Ventus erfolgreich eingesetzt ist.
Luftschraube ist eine RF20x13".
Die Maße sind alle sehr knapp
bemessen. Um den Einbau zu erleichtern sollte die Klappe und das KTW um
5-8mm nach hinten gesetzt werden. 5mm mehr Länge und 2mm mehr Breite
beim Ausschnitt können auch nicht schaden. Die KTW-Armlänge wurde
ebenfalls bei einem 2.Prototyp (3/2012) für eine andere Antares um 5mm
verlängert. Somit kann das Unterteil um einige Millimeter weiter nach
unten gesetzt werden. Der Platz nach unten war im Rumpf noch vorhanden.
Video-Links zum Klapptriebwerk
Zwei Videos des Klapptriebwerks bei Tests am Boden:
http://www.youtube.com/watch?v=ssdO-E0wcBo
http://www.youtube.com/watch?v=AKiFeGuQ6uI
Dynamischer Test des Klapptriebwerks auf dem Dach des Wohnmobils:
http://www.youtube.com/watch?v=T48qdX5JOq4
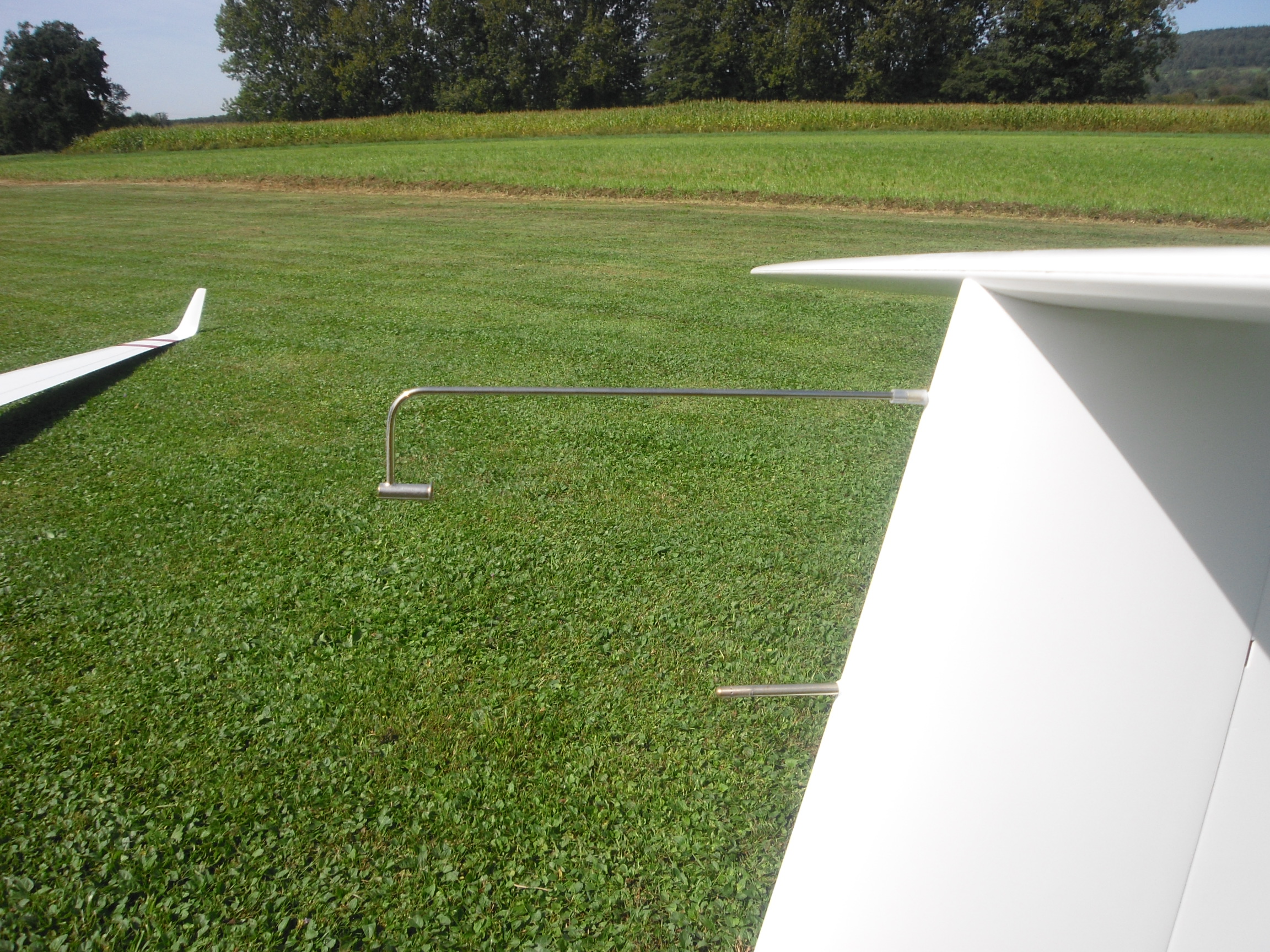
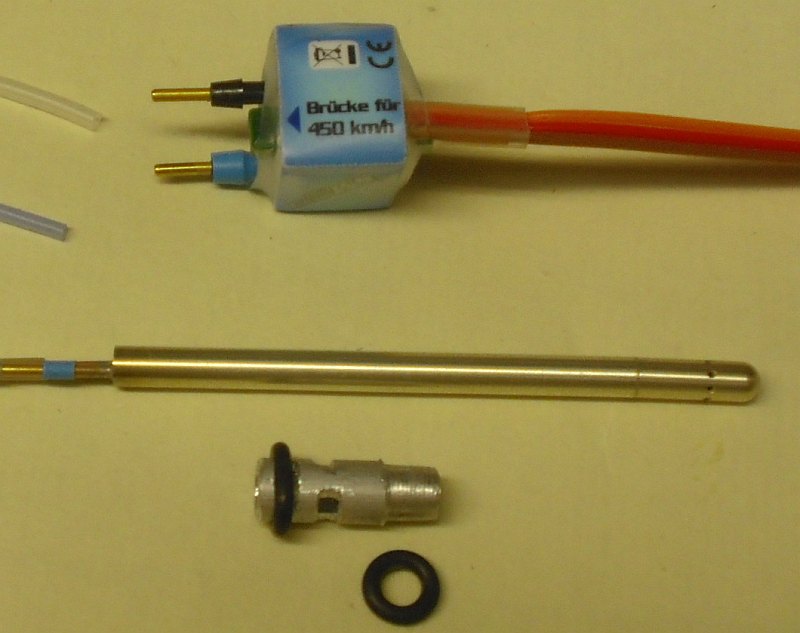
Versenkbares Pitot-Rohr zur Geschwindigkeitsmessung über den Staudruck
Das Pitot-Speed-Rohr ist mittels einer Eigenbauhalterung versenkbar. Links ist es eingeschoben.
Zwei O-Ringe und Schlitze im Halterrohr sorgen für die nötige Fixierung des Pitot-Rohrs.
Der Sensor ist in der SLW-Flosse verbaut und wird über eine UNI-Kabelverlängerung zum LinkVario geführt.
Dies ermöglicht kürzeste Schlauchverbindungen.
Details zum einfachen Kabinenausbau
Das ist ein Thema welches bei mir nicht so im Vordergrund steht und daher auch etwas spärlich ausfällt.
Nun hat aber (3/2013) doch ein Pilot von TUN-Modellbau (220gr) zusammen
mit dem Steuerknüppel-Satz von Schambeck-Luftsporttechnik das Cockpit
deutlich verschönert.
Der Gurtsatz ist von GroMoTec. Der Instrumentenpilz ist Bestandteil des
Baudis-Modells. Das Sitz- und Kopfpolster ist aus Fliesstoff gefertigt.
Hier noch zwei Links zum Antares in Foren:
http://www.rcgroups.com/forums/showthread.php?t=1400354
http://www.rc-network.de/forum/showthread.php/230919-Antares-1-3?highlight=antares
zurück
zur wshp Startseite